This page includes:
Members

ABSTRACT: Scene classification is an essential task in computer vision that involves categorizing an image into one of several predefined scene categories. Previous works for scene classification which global feature or topological representations or with the immediate representations of objects. One important use case in scene classification is in the context of service robotics that may need knowledge of the objects and their spatial relations in scenes for search and retrieval tasks. Recent popular approaches to scene classification may not capture the spatial relationships between objects in the scene. We propose a method to utilize the 3D spatial relationships between objects to better represent and classify scenes. This approach involves detecting 3D objects in the scene using a Frustum PointNets based approach with a fine-tuned model on the SUN RGB-D dataset and encoding their spatial relationships in a 3D metric space. The encoded spatial relationships are in a sequential order for object-to-object pair relations and are then used to predict the scene category by a Recurrent Neural Network (RNN). We report the results on both 3D object detection and scene classification against current state-of-the-art methods tested on the SUN RGB-D dataset. This scene classification method is additionally deployed on mobile video feeds from a stereo depth camera on a mobile robotic with high accuracy results to verify the effectiveness in real world environments.
DOWNLOAD

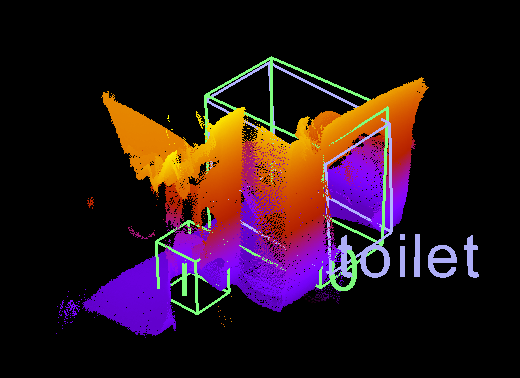
2D object detection into region proposals. The points from the 3D frustum extracted from the 2D region proposals is then fed into a 3D object classifier for validation.
Top 1 sceen prediction: 76.9
Top 2 scene predictions: 87.1
Top 3 scene predictions: 90.9
This project was a part of a 30 year long project of Dr. Tsotsos. The motivation is for helping elderly people and children with disabilities to reduce physical work load for caregivers. I was a RA for 8 months at the lab doing research on developing controls and algorithms for collision avoidance for an autonomous wheelchair in dynamic environments. I incorporated static and dynamic obstacle avoidance methods while considering social factors using multiple sensors to perform localization and path planning. The wheelchair was equiped with encoders for wheels and a ZED2 stereo camera which has an IMU, barometer, and magnetometer.

Short demo of obstacle avoidance behaviour from point A to B
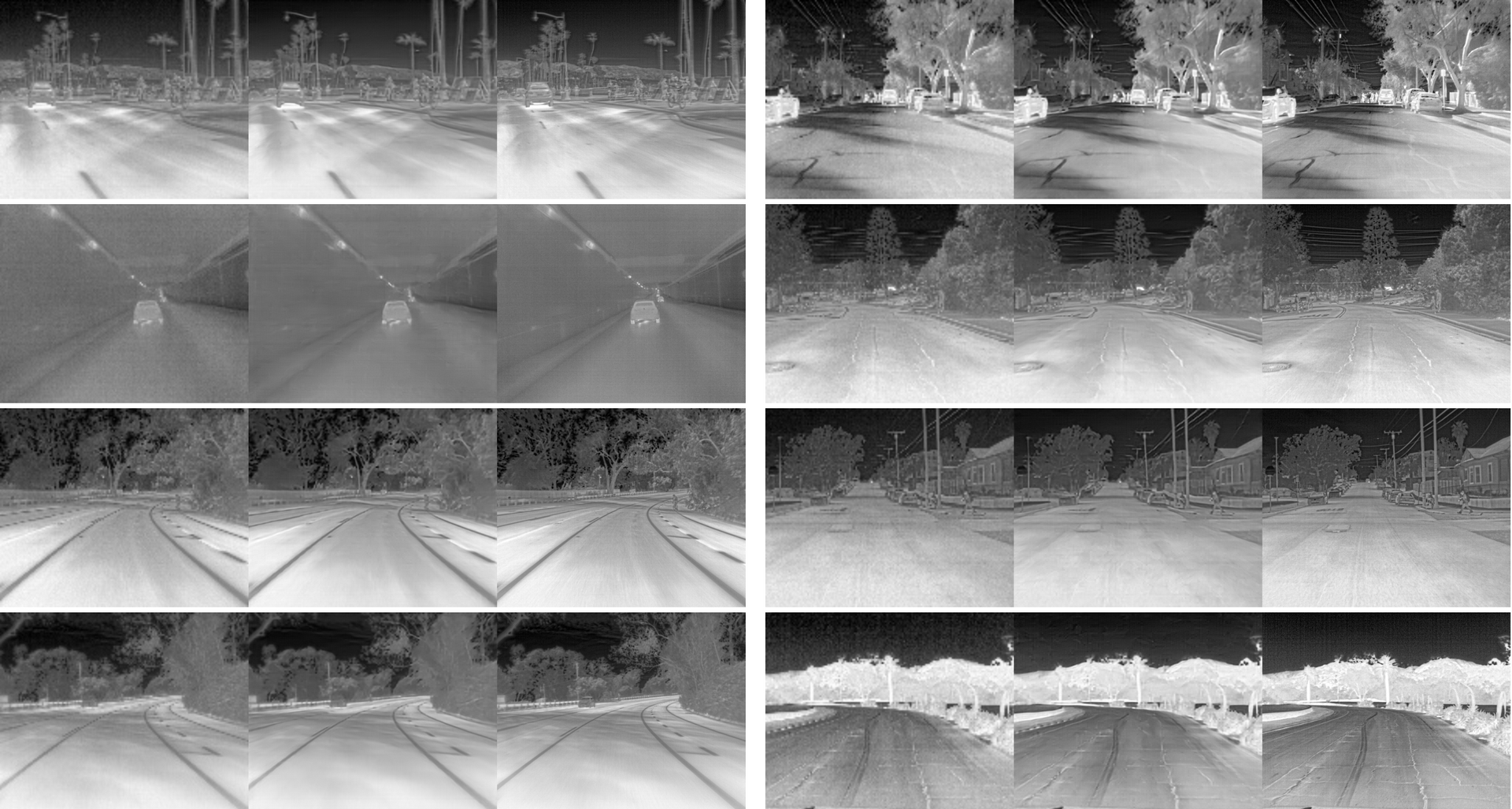
SRResNet results. Left picture is origin, middle is bicubic interpolation, right is neural net results
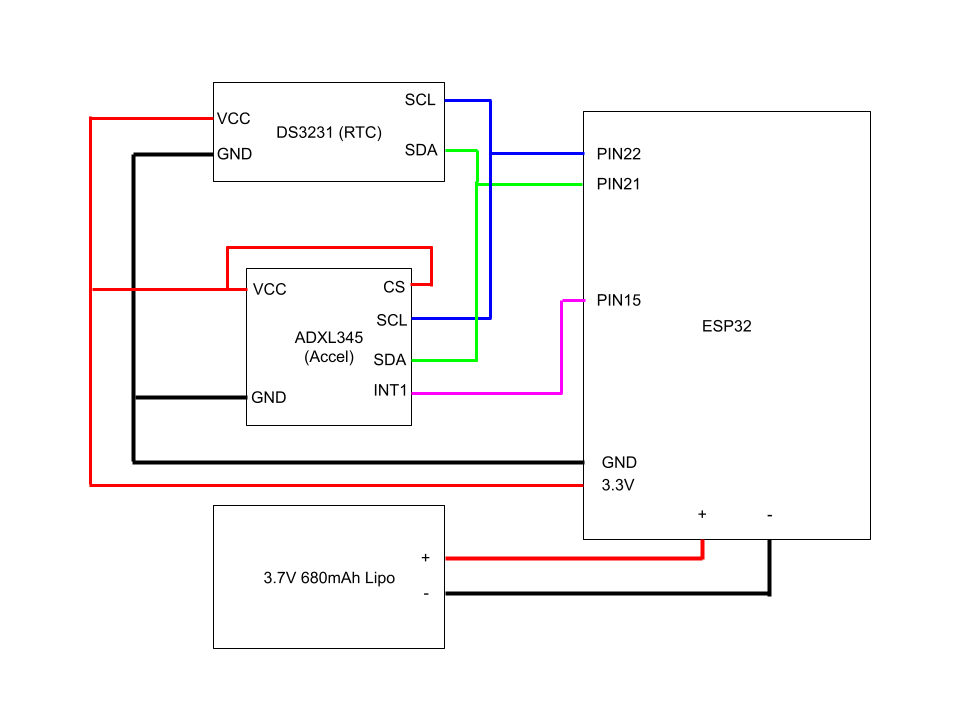
When formulating the original plans, we had a few best alternatives so that during testing we would be able to see which alternative would be the best for the specific tasks we desired to perform. Ultimately, we converged on an ESP32 as our microcontroller as it has a faster clock speed, built-in wifi capabilities, more flash memory, and SRAM compared to the Arduino. For the orientation detection, we converged on using the ADXL345 accelerometer chip. And we decided on wifi communication by using the user’s own IP address and wifi service to host a temporary webpage that holds the time information on the different states.
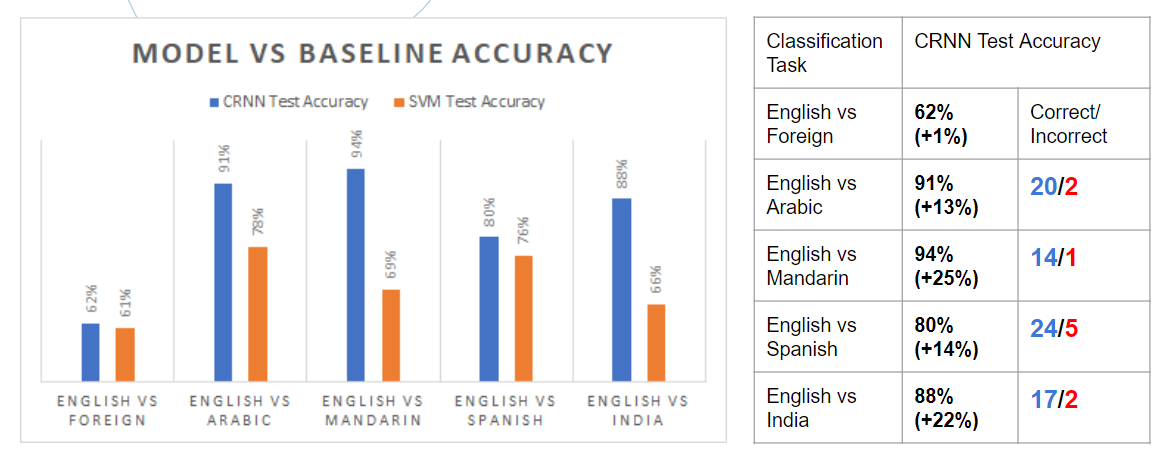
The goal of this project is to develop a CNN speech accent classifier which intakes an accented English phrase as input and correctly identifies the origin of the speaker’s accent. This goal is motivated by direct experiences with voice-controlled devices not understanding heavily accented English, which is especially prominent in immigrant families and friends. An accent classifier contributes to solving this problem by enabling the subsequent use of accent-specific text-to-speech algorithms to improve the voice-controlled device experience for accented speakers.
Members: Rocco Ruan, Julia Chae, Catherine Glossop, Mingshi Chi
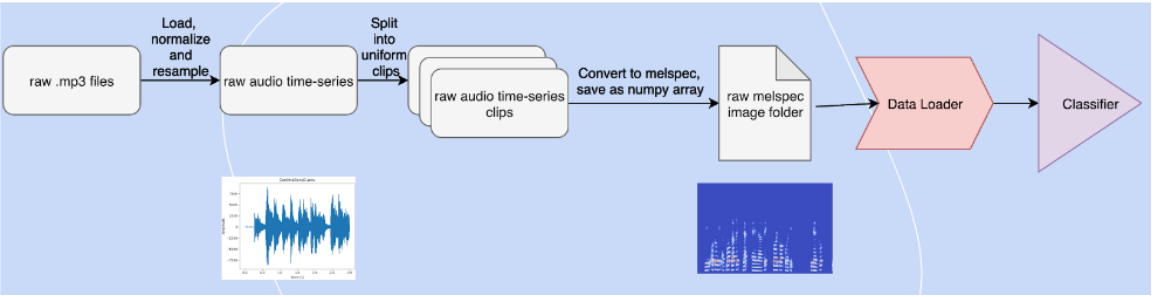
Data processing pipeline
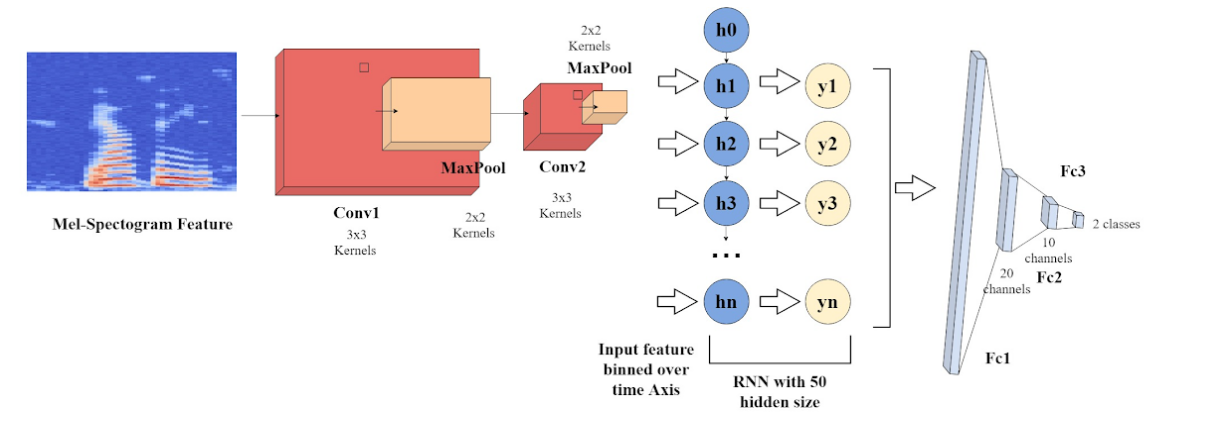
Neural Net Architecture
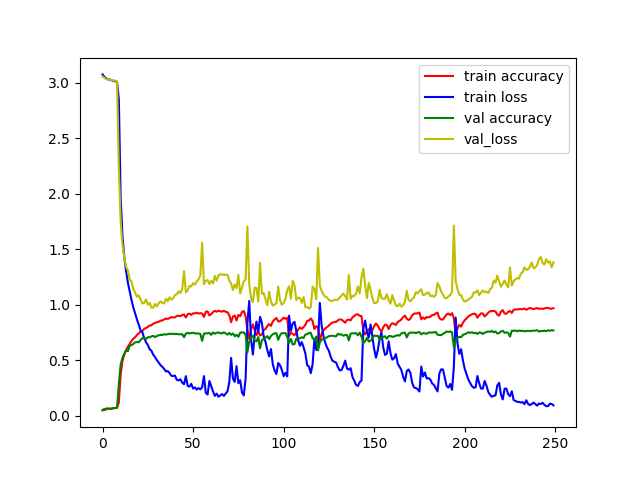
CRNN results compared to SVM results

Mingshi Chi, Catherine Glossop, Daniella Luna